当前位置:七道奇 → 下载中心 → 系统应用 → 绿色软件 → FANUC ROBOGUIDE 9.4中文破解版 V9.40072.00.05 免费非破解版下载
|
软件简介:上一页Archipack(Blender室内建模插件) V2.4.0 免费非破解版下载 下一页frps穿透服务器 V0.35.1 Windows版免费非破解版下载
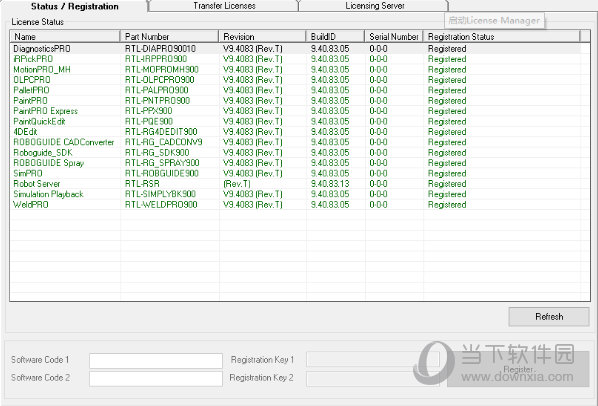
本软件是由七道奇为您精心收集,来源于网络转载,软件收录的是官方版,软件版权归软件作者所有,本站不对其观点以及内容做任何评价,请读者自行判断,以下是其具体内容: FANUC ROBOGUIDE 9.4是一款功能十分强大的工业机器人编程控制软件,该软件由FANUC研发出品,专门针对智能化机器人、数控等领域打造,用户通过这款软件能够高效率地完成对工业机器人和机械臂的程序编写,大大提高用户的工作效率,能够帮助用户轻松地完成工业机器人的仿真、测试、修改等,今天小编为大家带来了这款软件的破解版,该版本内附破解补丁,激活后即可永久免费使用,喜欢的小伙伴千万不要错过哦。
【软件特色】1、HandlingPRO HandlingPRO用于物料搬运应用,包括装载/卸载,包装,组装和物料搬运。HandlingPRO的功能包括CAD到路径编程,输送线跟踪,机器建模和编程。 2、PaintPRO FANUC Robotics PaintPRO软件是离线编程解决方案的图形,可简化机器人的路径,示教和涂漆工艺开发。操作员通过以图形方式选择要喷涂的零件区域并在几种喷涂方法之间进行选择,来自动生成机器人程序。 3、ROBOGUIDE-PalletPRO和PalletTool PalletPRO模拟软件可用于完全离线构建,调试和测试码垛应用程序。PalletPRO允许用户创建工作单元布局,进料和托盘站,衬纸和托盘分配器。使用PalletPRO的内置行业标准模式库,可以在3-D中创建并可视化数百个单位负载托盘配置。在PalletPRO中创建的数据可以下载到包含PalletTool®软件的真实机器人控制器中。 4、WeldPRO WeldPRO模拟机器人电弧焊过程。WeldPRO CAD到路径编程功能支持自动生成具有定义的割炬角度和过程参数的多个机器人组协调的运动程序。可以将虚拟工作单元中的程序和设置转移到真实的机器人上,以减少安装时间。
【使用教程】关于Workcell布局教程 注意:关于对象 您可以将各种类型的对象添加到工作单元(例如,机器人,工具,障碍物,固定装置和零件)。 有关工作单元的更多详细信息,请参阅“关于工作单元”。 工作单元布局流程教程 本教程包括以下步骤。
步骤1: 创建一个新的工作单元,按照向导从开始屏幕创建一个新的工作单元。 第2步: 将夹具添加到工作单元中通过拖放从示例数据文件夹中添加夹具。 第三步: 将零件添加到工作单元中通过拖放从示例数据文件夹中添加零件。 步骤4: 添加目标将目标(可以任意设置的位置信息)设置到刀具中心点(TCP)的位置。 当您完成本教程时,将创建一个机器人移动零件的工作单元。 创建工作单元之前的屏幕 在开始本教程之前,请确保ROBOGUIDE处于以下状态。 ROBOGUIDE已启动。 仅显示开始屏幕。 步骤1:创建一个新的工作单元 ROBOGUIDE提供了一个向导来创建新的工作单元。 在此步骤中,您将使用“工作单元创建向导”设置以下项目。
处理 工作单元名称 机器人的各种设定 完成工作单元创建向导后,将创建一个虚拟机器人。 注意:关于虚拟机器人 虚拟机器人是在您的PC上运行的机器人,可以模拟实际的机器人,控制器和示教器。 创建一个新的工作单元 单击开始屏幕上的“新建单元格”按钮。 将出现“工作单元创建向导”。
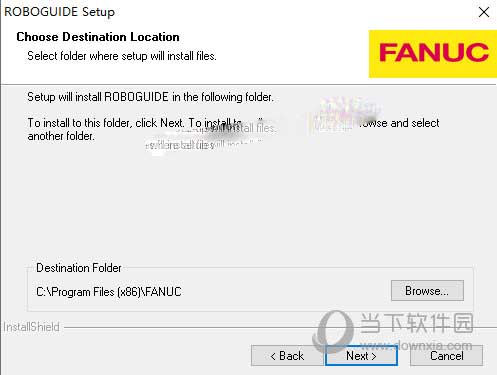
【破解说明】1,双击Setup.exe,选择程序安装目录、组件,安装软件
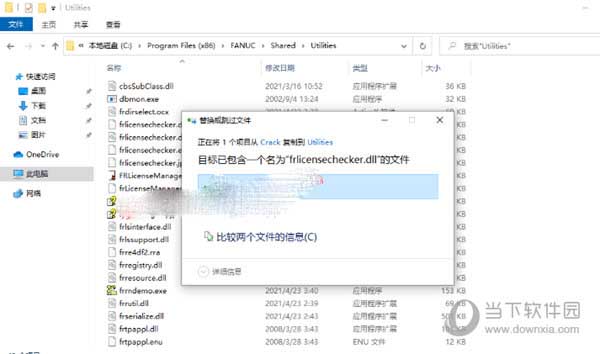
2,软件安装完成后,复制frlicensechecker.dll到软件安装目录下Shared\Utilities替换原文件 默认路径C:\Program Files (x86)\FANUC\Shared\Utilities
3, 安装激活完成,打开软件使用即可 【下载地址】FANUC ROBOGUIDE 9.4中文破解版 V9.40072.00.05 免费版“FANUC ROBOGUIDE 9.4中文破解版 V9.40072.00.05 免费非破解版下载[绿色软件]”系转载自网络,如有侵犯,请联系我们立即删除,另:本文仅代表作者个人观点,与本网站无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性七道奇不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 |
|||||||||||||||||||||||